Data fusion for autonomous navigation
 자율주행을 위한 데이터 융합
자율주행을 위한 데이터 융합
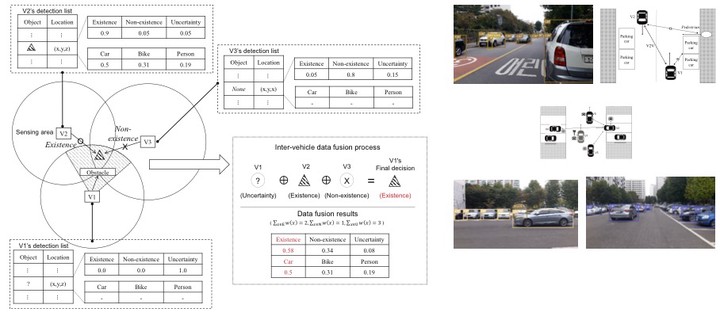
Autonomous navigation systems require timely decision making and collaboration to ensure safety. In this research, we study a real-time fusion of various sensor data, for example, vision, LiDAR, radar data in collaborative environments.